ARNEIS project journal - dev-cw05
As I announced in a previous post
Your team “B-AROL-O Bottling Systems” and project “ARNEIS: Automated Recognizer, Network-Enabled, Items Sorter” have been selected as one of just 50 teams to move on to Phase 2 of OpenCV Spatial AI Contest. Your team name and region are listed on the official webpage at https://opencv.org/opencv-spatial-ai-contest/
Here is the report of our progress in the ARNEIS project after the end of CW05-2022.
What did we accomplish this week?
In Sprint dev-cw05 we closed 25 issues or Pull Requests.
Let's now dig into some of the major results we achieved during last week.
OAK-D-Lite LEGO® mechanical adapter
Alessandro designed a mechanical support for the OAK-D-Lite camera, and he made it using only original LEGO® Technics parts - so for the joy of LEGO® purists no 3D printing parts or modified bricks are required.

Another remarkable feature of this design is that it leaves the dissipation surface of the OAK-D-Lite uncovered; this should minimize overheating the OAK-D-Lite when the camera is in use.
You may find more details, including the complete Studio 2.0 CAD model, at https://github.com/B-AROL-O/ARNEIS/blob/main/mocs/studies/camera-support.
This design - like all the other deliverables of the ARNEIS project - is released under the MIT license. We encourage everybody - including the other OpenCV Spatial AI Contest finalists, to use and possible improve it. If so, feel free to submit a Pull Request on ARNEIS project on GitHub.
Motorized Bottle Conveyor (2022-02-06)
Alessandro also published an evolution of the conveyor idea that was presented last week. Now a motor and relative gearing is applied to the driving sprocket wheel.
All the parts used in this design are available in the LEGO® 42100 Liebherr R9800 set.
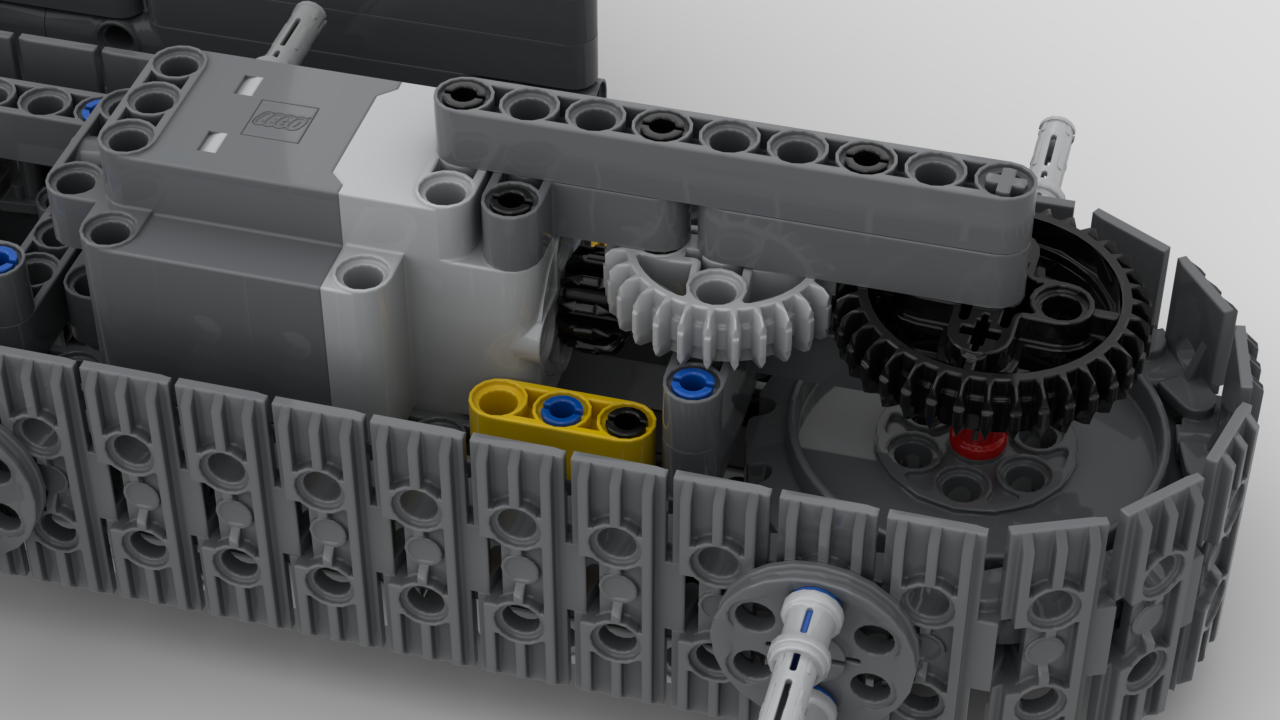
You may find more details, including the complete Studio 2.0 CAD model, at https://github.com/B-AROL-O/ARNEIS/blob/main/mocs/studies.
Steps for training our custom Neural Network
Gianluca has been trying to run the Training of a custom Neural Network on a workstation he has at home.
He started from the sample notebooks at https://github.com/luxonis/depthai-ml-training and whenever he faced an issue he asked Luxonis directly and with their GREAT help he is moving forward. You may find details on the upstream issue luxonis/depthai-ml-training#17.
In parallel Gianluca has tried other solutions, one of which - even though a little convoluted - eventually managed to achieve the goal.

You may find the complete HOWTO on https://arneis.readthedocs.io/.
Next week plans
Our plan for next week is available on GitHub: https://github.com/B-AROL-O/ARNEIS/milestone/12.
Unfortunately we will not be able to progress much further with the mechanical design until we get the actual LEGO set.
On the other hand, we are going to train the ARNEIS Neural Network using photos taken with the OAK-D-Lite to our set of "mignon" bottles:

In parallel we would like to evaluate Roboflow which - based on the information we collected so far - should simplify and speed up the training process a lot. If you have first-hand experience on Roboflow, please report your success stories and/or lessons learned on https://github.com/B-AROL-O/ARNEIS/issues/123.
That's all, folks
Thanks for reading up to the end of such long post!
If you want to help with the ARNEIS project or just say hello to us, please get in touch with us through GitHub at https://github.com/B-AROL-O/ARNEIS or Twitter at https://twitter.com/baroloteam.
Gianpaolo on behalf of the B-AROL-O Team.